多工位全自动压力试验机
一、方案描述:
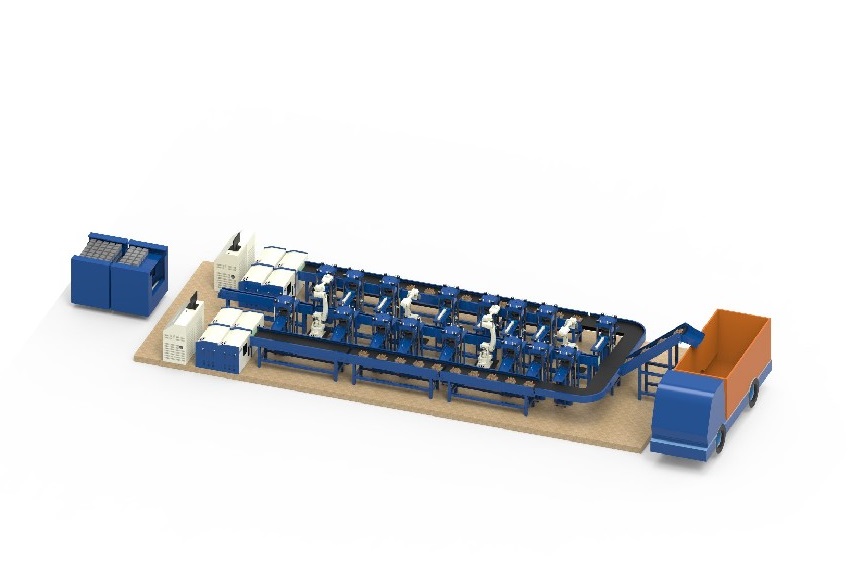
该全自动压力试验机机器人集成系统主要由12台压力试验机及油源控制系统、4套ABB工业机器人、上料输送线、下料输送线、扫码器、料渣自动清理装置及控制系统操作站组成。该系统是以机器人为位置核心组成的一套封闭式全自动检测站。
二、设计思路:
l本系统主要适用于全自动压力试验机机器人集成系统;主要用于100mm×100mm立方体试块、直径100mm ×200mm的圆柱体和50mm×50mm灌浆立方块。
l本方案采用12台2000kN压力试验机、4台50kN压力试验机与4台10kg ABB机器人相配合的方式,配置上料输送线、下料输送线、扫码器、料渣自动清理装置等设备,完成用户所要求试块工件的自动检测及回收要求;
l 机器人:机器人设置混凝土夹爪1套,夹持产品外径范围符合上述3种试样工件的尺寸要求;机器人夹持过程不可破坏产品结构;
l 扫码器:对试样上贴的条形码或二维码自动扫码录入系统,智能化管理;
l 自动下料装置:采用气体做动力源,对试验后的混凝土料渣自动进行清扫,无需人工干预;
l 上料输送线:上料输送线能将三种工件送入上料位置,带有不可读RFID标签的立方体在进料输送机开始时拒收,且不得送入机器人装置单元。
l 下料输送线:清扫后的混凝土料渣通过下料输送线自动归集,输送至料渣回收货车或其他设备,经由人工转运他处;
三、工作流程:
l4个区域为相同配置为1台机器人为4台压力机上下料。单区域整个工作时间流程主要为:①人工将试样按要求摆放到上料输送线指定区域à②人工启动系统运行à③机器人抓取试样进行扫码à④机器人为试验机上料à⑤试验机进行压缩试验,同时机器人抓取试样扫码,为另三台试验机上料à⑥试验完成后,料渣自动清理装置将压盘上的试块料渣清扫干净,料渣落入下料输送线,下料输送线将料渣送入回收装置à⑦机器人抓取下一件试样进行试验 à⑧重复上述③④⑤⑥⑦过程至全部试样试验完毕à⑨人工将回收后的料渣转运他处。
IRB-1600型机器人参数:


 ACTS-P2000/50多工位全自动压力试验机
ACTS-P2000/50多工位全自动压力试验机