系统概述:
本系统为更好的服务于建工检测机构日益增加的产品检测量的实际需求,有效的减少人力、物力成本,系统力求做到高柔性,以确保系统的性价比达到最高。
我们以经济性、安全性、良好的操作性、可靠性作为基本原则准则,并把优质的设备作为我们首要追求的目标。
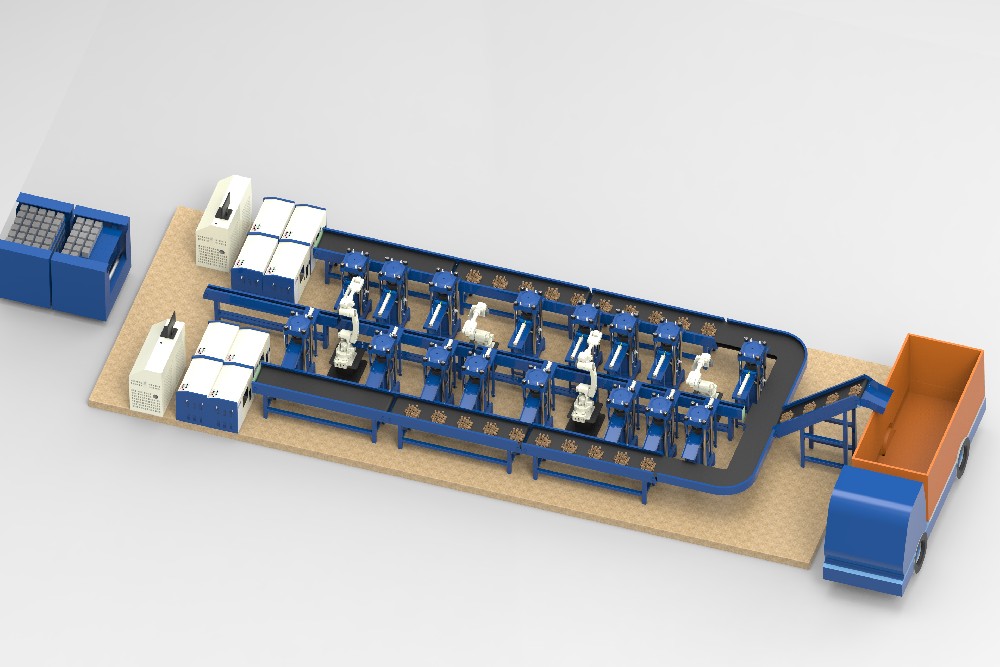
●全自动压力试验机机器人集成系统主要用于100 mm×100 mm立方体试块、直径100mm×200mm的圆柱体和50mm×50mm灌浆立方块的大批量试验。
●系统采用12台2000kN压力试验机、4台500kN压力试验机与4台10kg ABB机器人相结合的方式,配备上料输送线、下料输送线、扫码器、料渣自动清理装置等装备,完成用户所要求试块工件的自动检测及废料回收要求;
●主控制柜是整个机器人工作站的集控核心,负责软件测试系统、机器人、试验机等电气元件的联动控制;
●人工负责进行试验检测前的试样上料,通过测试软件系统调取该类试样的测试程序,启用程序试验;人工负责所有试验完成回收的料渣转运;
●机器人:机器人设置混凝土夹爪1套,夹持产品外径范围符合上述3种试样工件的尺寸要求;机器人夹持过程不可破坏产品结构;机器人负责检测试样的抓取、扫码、上料;末端夹持器采用多组传感装置,避免出现误抓、空抓等不当操作,提高试样的测试效率;
●扫码器:对试样上贴的条形码或二维码自动扫码录入系统,智能化管理;
●自动下料装置:采用气体做动力源,对试验后的混凝土料渣自动进行清扫,无需人工干预;
●上料输送线:上料输送线能将三种工件送入上料位置,带有不可读RFID标签的立方体在进料输送机开始时拒收,且不得送入机器人装置单元。
●下料输送线:清扫后的混凝土料渣通过下料输送线自动归集,输送至料渣回收货车或其他设备,经由人工转运他处;
●软件系统:可根据试验结果自动判定试样材料是否合格,并与机器人实现实时通讯;试验结果可针对不同权限设有录入、导出、共享等功能;软件测试系统,拥有自主知识产权,自主开发全部的测控系统及软件,设计合理高效的自动检测流程,具有功能完善的数据处理与上传系统。整体管理软件和试验软件一体化,实现检测线各部分的检测与综合协调控制。
●安全防护:试验机基础颜色为深蓝灰色,机械手颜色为机械手标准着色。各机台应配备防护及限位保护功能,检测模块运行过程中应确保无危害人员及设备安全的因素存在;
●检测模块范围内,作业人数不超过1人/班,需兼顾上下料的配送、流转及试验过程状态的监控;
系统组成:
序号 | 名称 | 数量(套) | 备注 |
1 | 机器人 | 机器人本体 | 1 | ABB |
机器人控制器 | 1 | ABB |
机器人示教器 | 1 | ABB |
线缆 | 1 | ABB |
变压器 | 1 |
|
机器人底座 | 1 | 全力测试 |
2 | 机器人搬运抓手快换系统 | 1 | 全力测试 |
3 | 上料输送线 | 1 | 全力测试 |
4 | 下料输送线 | 1 | 全力测试 |
5 | 扫码器/读卡器及承重装置 | 1 | 知名品牌 |
6 | 料渣自动清理装置 | 4 | 全力测试 |
7 | PLC集控系统 | 1 | 全力测试 |
8 | 2000kN压力试验机 | 12 | 全力测试 |
9 | 500kN压力试验机 | 4 | 全力测试 |
系统整体为独立运行,通过软件系统进行协调控制,保证设备和人员配置的满负荷工作状态。整体的占地面积约为90平方米(L15m×W6m)。系统占地面积及规划

自动检测线的工作流程:
4个区域为相同配置为1台机器人为4台压力机上下料。单区域整个工作时间流程主要为:①人工将试样按要求摆放到上料输送线指定区域à②人工启动系统运行à③机器人抓取试样进行扫码à④机器人为试验机上料à⑤试验机进行压缩试验,同时机器人抓取试样扫码,为另三台试验机上料à⑥试验完成后,料渣自动清理装置将压盘上的试块料渣清扫干净,料渣落入下料输送线,下料输送线将料渣送入回收装置à⑦机器人抓取下一件试样进行试验 à⑧重复上述③④⑤⑥⑦过程至全部试样试验完毕à⑨人工将回收后的料渣转运他处。
机器人系统
ABB IRB-1600机器人:优选ABB公司自主研发的IRB-1600工业机器人。

IRB-1600型机器人参数:
自由度 | 6 |
| 环境条件 | 环境温度 | 5-45° |
|
负荷 | 10kg | 相对湿度 | 恒温下最高为95% |
最大到达范围 | 1450mm | 振动 | ≤0.49g |
重复定位精度 | ±0.05mm | 其他 | 远离易燃或腐蚀液体 |
驱动方式 | 交流伺服电机 | 功耗 | 0.58KW |
安装方式 | 地面/侧挂或吊装 | 本体重量 | 20.5kg |
防护等级 | IP54 |
|
动作范围 | S轴 | ±180。 | 最大速度 | S轴 | 180。/s |
L轴 | +150。~-90。 | L轴 | 180。/s |
U轴 | +65。~-245。 | U轴 | 185。/s |
R轴 | ±190。 | R轴 | 385。/s |
B轴 | ±115。 | B轴 | 400。/s |
T轴 | ±400。 | T轴 | 460。/s |
机器人与各工位之间的配合
当系统软件控制试验机完成压缩试验后,会给机器人和下料装置信号反馈,系统根据接收信号的先后顺序执行调取相对应的下料、抓取、扫码、上料动作。
上料输送线和下料输送线
试样上料输送线和下料输送线,上料输送线能将100mm×100mm立方体、100mm直径×200 mm圆柱体立方体和50mm×50mm立方体送入机器人单元。带有不可读RFID标签的立方体在上料输送线开始时拒收,且不得送入机器人装置单元。下料输送线采用高耐磨复合带制成,以承受来自破碎立方体的碎屑的恶劣条件,并以一定角度向上倾斜,将粉碎的立方体输送到大约2.5 m高度的碎屑容器中。
扫码器
本系统扫码器固定于立式平台上,优选知名品牌,采用线性激光技术,对条码进行高密度激光扫描,并具有USB、键盘PS2、串口等多接口支持技术,满足所有设备接口要求。即插即用,设置简单,固定方便。
料渣自动清理装置
料渣自动清理装置自主设计,选用国际知名品牌标准气缸,将试验后的试块碎料灰尘清理干净并送入下料输送线。全力机器人系统安全防护围栏
防护围栏根据现场实际测绘图纸进行合理配置。在保证安全的前提下,做到不妨碍工作人员对所有需要人工干预的设备进行的可能型操作。

 全力全自动压力试验机机器人集成系统
全力全自动压力试验机机器人集成系统